Servo Gearbox Drive Selection Guide
A servo gearbox drive is selected not only by ratio or frame size. For automation systems, the gearbox must match the motor, load, accuracy requirement, mounting space, and motion cycle so the complete drive chain performs reliably.

What Is a Servo Gearbox Drive?
A servo gearbox drive is a transmission system that combines a servo motor with a gearbox to control speed, torque, and motion output. The servo motor provides controlled rotation, while the gearbox adjusts that rotation to match the actual machine requirement.
In many automation systems, a servo motor runs at a speed that is too high for the load. At the same time, the load may need higher torque than the motor can deliver directly. A gearbox helps reduce output speed and increase usable torque, while also helping match motor inertia to the driven mechanism.
Why Servo Systems Need Gearboxes
Servo motors are often selected for accurate control, fast response, and repeatable movement. However, the motor alone may not be ideal for the final mechanical load. A gearbox drive can help improve torque delivery, reduce speed, and fit the motor into a more practical machine layout.
More Usable Torque
Gear reduction allows the servo system to deliver stronger output torque for moving, lifting, indexing, or accelerating a load.
Better Speed Range
A gearbox helps convert high motor speed into a lower output speed that matches the real working speed of the machine.
Improved Load Matching
The right gearbox ratio can help the servo motor handle load inertia more effectively and improve motion stability.
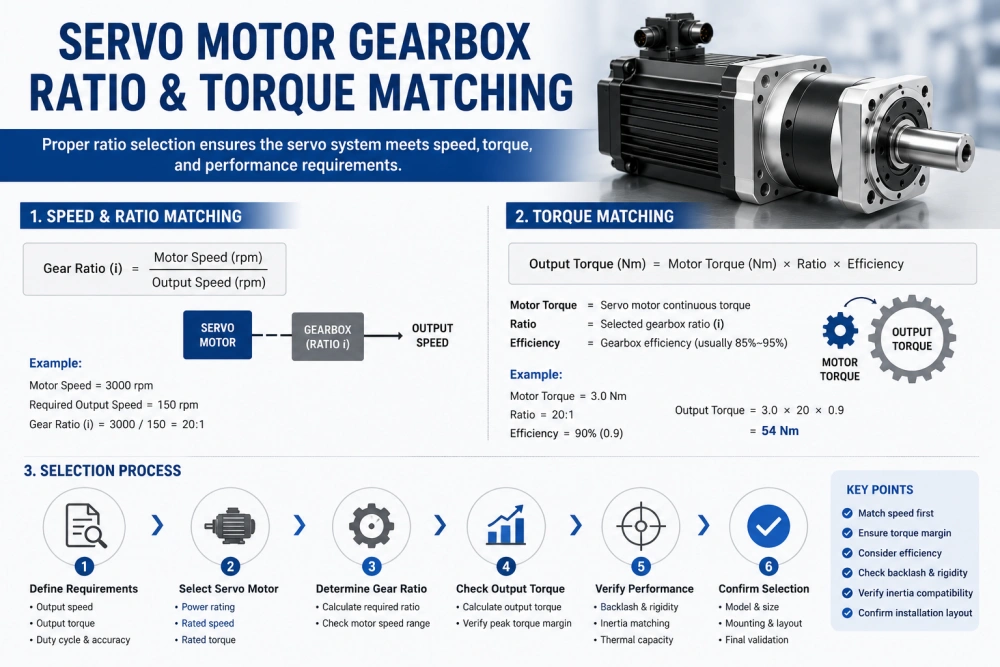
Ratio and Speed Matching
Gear ratio is one of the first points to check when selecting a servo gearbox. The ratio determines how much the motor speed is reduced and how the output speed changes. For example, if the motor runs at high speed but the machine needs slow movement, a higher reduction ratio may be required.
But a higher ratio is not always better. Too much reduction can make the output speed too low, reduce system responsiveness, and create unnecessary mechanical limitations. A practical ratio should keep the servo motor in a good operating range while delivering the required output speed.
Questions to check before choosing the ratio
- What is the required output speed?
- What is the normal operating speed of the servo motor?
- Does the application need quick acceleration and deceleration?
- Will the chosen ratio make the motor run in a stable speed range?
- Is the required output torque still within gearbox capacity?
Torque and Load Check
Torque selection should include both normal working torque and peak torque. Many automation systems do not run under constant load. They may start, stop, accelerate, index, or reverse direction frequently. These movements create short-term peak loads that must be considered.
The gearbox should not only handle the average load. It should also have enough capacity for acceleration, shock load, and duty cycle. If torque is underestimated, the gearbox may become noisy, overheat, wear faster, or fail earlier than expected.
| Selection Factor | What to Check | Why It Matters |
|---|---|---|
| Rated Torque | Normal torque needed during stable operation | Ensures the gearbox can run continuously under working load |
| Peak Torque | Short-term torque during start, stop, acceleration, or impact | Prevents overload during dynamic motion |
| Load Inertia | Rotational inertia of the driven mechanism | Affects servo response, stability, and motor control performance |
| Duty Cycle | Running time, stop time, cycle frequency, and working hours | Influences heat, wear, lubrication, and service life |
Backlash and Rigidity
Backlash is a key factor in servo gearbox selection. It refers to the small clearance between gear teeth that can cause lost motion when direction changes. In a simple conveyor, backlash may not be critical. In a positioning axis, inspection table, or robotic motion system, backlash can directly affect accuracy.
Torsional rigidity is also important. Even if backlash is low, a weak gearbox structure may twist under load, causing positioning delay or vibration. For high-response servo systems, low backlash and high rigidity should be considered together.

Mounting Layout and Machine Space
Servo gearbox drive selection is also limited by machine layout. Sometimes the motor can be installed directly in line with the load. In this case, an inline gearbox may be suitable. In compact machines, the motor may need to be installed at 90 degrees to the output shaft, so a right angle gearbox becomes more practical.
Common layout choices
- Inline servo gearbox: suitable for straight motor-to-load transmission.
- Right angle servo gearbox: useful when the motor must be mounted from the side.
- Planetary servo gearbox: selected when compact torque and rigidity are important.
- Rotary drive module: useful for indexing tables, inspection fixtures, and angle positioning.
Common Servo Gearbox Selection Mistakes
Many gearbox selection problems come from looking only at one parameter. A gearbox may have the right ratio but poor backlash. It may have enough torque but poor mounting fit. It may look compact but lack rigidity for fast servo motion.
Choosing Only by Ratio
Ratio is important, but torque, backlash, rigidity, speed, and mounting size must also be checked.
Ignoring Peak Torque
Servo systems often create short peak loads during acceleration, stop, or reversing movement.
Overlooking Backlash
A low-cost gearbox may work for simple motion but fail to meet positioning requirements.
Practical Selection Checklist
Before choosing a servo gearbox drive, collect as much application information as possible. The clearer the machine requirement, the easier it is to avoid wrong model selection.
- Servo motor power, speed, shaft size, and flange size
- Required output speed and motion cycle
- Normal torque and peak torque
- Load inertia and acceleration time
- Backlash and repeatability requirement
- Inline or right angle installation
- Working environment, duty cycle, and expected service life
Related Servo Gearbox and Motion Resources
For product-level research, users can review servo planetary gearbox solutions when the application requires compact torque transmission, low backlash, right angle reducer options, or precision automation drive components.
For rotary positioning applications, users can also review hollow rotary table and servo indexing solutions when the machine needs repeatable angle positioning, hollow center routing, or rotary motion control.
FAQ
What gearbox is best for a servo motor?
A planetary gearbox is commonly used with servo motors because it provides compact size, high torque density, good rigidity, and suitable ratio options for automation applications.
Is low backlash always necessary?
Not always. Low backlash is important for positioning, reversing motion, indexing, and precision control. For simple continuous running, backlash may be less critical.
How do I choose the gearbox ratio for a servo motor?
Start from the required output speed and the motor’s normal operating speed. Then check whether the selected ratio also meets torque, acceleration, and control requirements.
When should I use a right angle servo gearbox?
A right angle servo gearbox is useful when the motor cannot be installed in line with the output shaft, or when the machine has limited space for motor mounting.
Need Help with a Servo Gearbox Drive Application?
Contact Gearbox Drive if you are comparing servo gearbox ratio, torque, backlash, layout, or planetary gearbox options for industrial automation.
Hi, this is a comment.
To get started with moderating, editing, and deleting comments, please visit the Comments screen in the dashboard.
Commenter avatars come from Gravatar.